In our daily life, it is a simple and straight-forward task to pick up and move objects such as a pen or a milk cup. However, in the micro-world, the typical dimension of substances is only a few micro- or nanometers (about one hundred to ten thousand times finer than a strand of human hair), which is far beyond the reach of human hands or other conventional tools. Then it is natural to ask this question: how to manipulate things in the micro-world at our will?
As early as 400 years ago, scientists found out that light carries momentum. Therefore, mechanical force can be imposed on substances upon light illumination, which is termed as “optical force”. This very principle was adopted by Arthur Ashkin, who invented and first proposed the idea of optical tweezers back in 1982. The major component of optical tweezer is one or two tightly focused laser beams that can trap and move tiny objects (micro particles, living cells, etc) via exertion of optical force (Fig. 1), the functional principle of which is similar to the use of a conventional tweezer. In 2018, Ashkin was awarded with Nobel Prize in Physics for the invention of optical tweezer. Since optical tweezer allows non-contact, damage-free manipulation of micro-nano objects, it has been widely applied in biological science, nanoengineering, quantum optics, where light can be used for cell sorting, construction of single-molecular materials and investigations on the quantum states of isolated individual particles, etc.
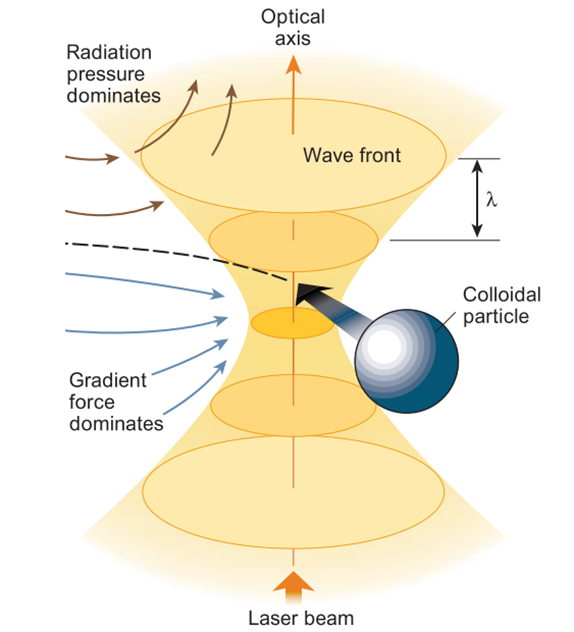
Fig. 1: A micro object is trapped with optical gradient force in a focused beam
Nature, 2003, 424(6950): 810-816.
There is no doubt that optical force extends the capability of objects manipulation in the micro-world. However, its application scenario is strictly restrained in liquid environments. It should be noted that the magnitude of optical force is only a few piconewtons. In a non-liquid environment, the adhesion force is at micronewton scale, far surpassing the optical force and gravitational force of typical micro-objects. To bypass the influence of adhesion force, the manipulated objects are mostly suspended or immersed in fluidic media.
Micro rotator driven by light
As was demonstrated above, micro-objects in a non-liquid environment are shackled by the adhesion force. How to tame the adhesion force and make the micro-/nano-objects dance with the shackles?
In 2019, Professor Min Qiu’s research group from Westlake University provided an answer to this question, which is based on the multiphysical coupling between light, heat and elastic wave. The proposed scheme exploits elastic waves to generate the driving force at micronewton level, sufficient in overcoming the adhesion force of the same order of magnitude. As is shown in Fig. 2, with light guided into the micro-fiber, the attached gold plate exhibits a rotational motion around the fiber with sub-nanometer precision, which sets up an example of light actuation in adhesive environments.
Nevertheless, a comprehensive explanation of the interplay between the adhesion force and the elastic wave is still lacking. Besides, motions of higher degrees of freedom beyond rotation should be explored for further investigation.
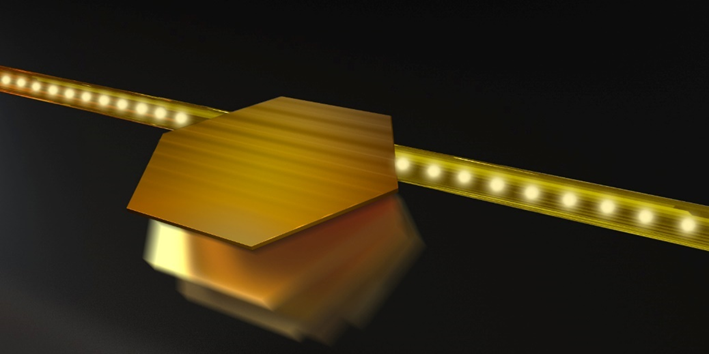
Fig. 2: Rotational motion based on Lamb wave (elastic wave)
Science advances, 2019, 5(3): eaau8271.
Three-dimensional micro light actuator in non-liquid environments
Recently, Min Qiu’s research group has supplemented the existing actuation framework by including the translational locomotion. Moreover, a detailed mechanism of multiphysical coupling was unveiled for the first time. The research paper was published on Light: Science & Application with the title “Micro-scale opto-thermo-mechanical actuation in dry adhesive regime”. Weiwei Tang, Wei Lyu, Jinsheng Lu are listed as first authors. Fengjiang Liu and Jiyong Wang are co-authors. Corresponding authors are Wei Yan and Professor Min Qiu.
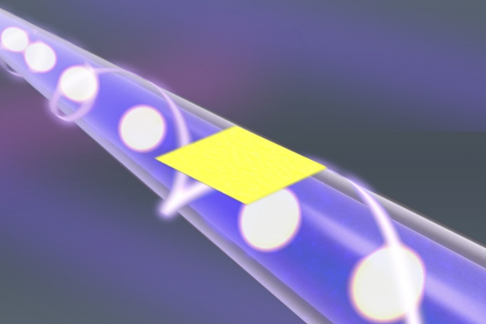
Fig. 3: 3D locomotion through light-thermo-elastic wave coupling
The 3D light actuator is still based on the gold plate-fiber system. First, nanosecond light pulses are coupled into the microfiber which excites surface plasmon polaritons (SPP) in the attached gold plate and causes strong light absorption. As the result of the pulsed heat deposition, the gold plate would experience abrupt expansion, followed with a sluggish contraction upon subsequent cooling. The periodic expansion-contraction event leads to the excitation of elastic waves in the gold plate, which get reflected at the plate’s outer edges and interact with the contact region of the fiber-plate system. We highlight that there exists a threshold of the inlet light power. When the input power is lower than the threshold, the driving force generated by the elastic wave is insufficient in overcoming the adhesion force and the gold plate would stay still. In contrast, the gold plate would start to locomote after the threshold condition is satisfied with the generated driving force surpassing the surface adhesion (Fig. 4). The interplay between the driving force and the friction force bears similarities to the process of walking in macroscale. Only that in the plate-fiber micro system, it is the excitation of elastic wave through multiphysical processes that is key to drive the gold plate to “walk”.
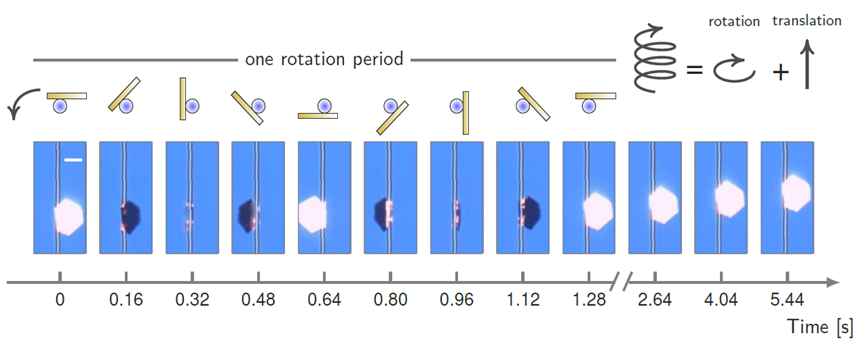
Fig. 4: Recorded spiral motion of the gold plate on a micro-fiber
By introducing asymmetries in the gold-plate system, spiral motion of the gold plate around the fiber can be observed, the direction and speed of which is determined by the level of asymmetry of the contact region between the gold plate and the fiber. Once the contact is specified, the locomotion speed can be controlled and adjusted by tuning the input single pulse energy and laser repetition rate (Fig. 5).
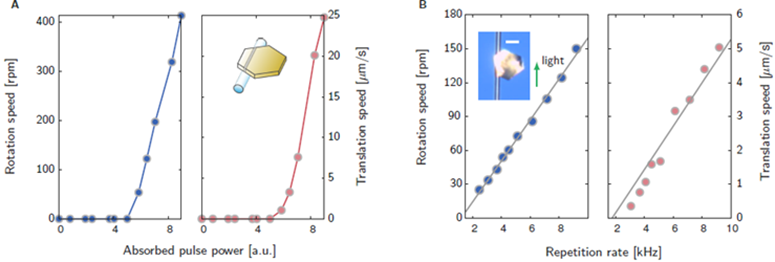
Fig. 5: Relationship between the locomotion speed and the (A) single pulse energy and (B) repetition rate of the light source
Research prospects
Various applications can be realized with the light-enabled actuator in adhesive regimes. For instance, once the proposed technique is combined with on-chip waveguides, cargo transportation and all-optical modulation can be achieved on photonic integrated circuits. Besides, via careful design of the light source and the geometry of the actuator, construction of multi-mode micro robots based on on-chip platforms can also be made possible.
Information of the article:
Tang, WW., Lyu, W., Lu, JS. et al.Micro-scale opto-thermo-mechanical actuation in the dry adhesive regime. Light Sci Appl 10, 193 (2021).
Reprinted from: Westlake University
